|
|

|

|
| e-Pub |
Section: New Results
Visual localization with Open Street Map
Participants : Jean-Alix David, Amaury Nègre.
Given the lack of precision of GPS for localization, it is necessary to implement new ways to improve localization. Here we introduce a new method using a geographic map and a camera to do so. The main point of this method is to combine sensor readings and known data about the environment. We detect lines on the road with the camera, and then compare the extracted lines to the ones stored in the map using ICP (Iterative Closest Point) algorithm.
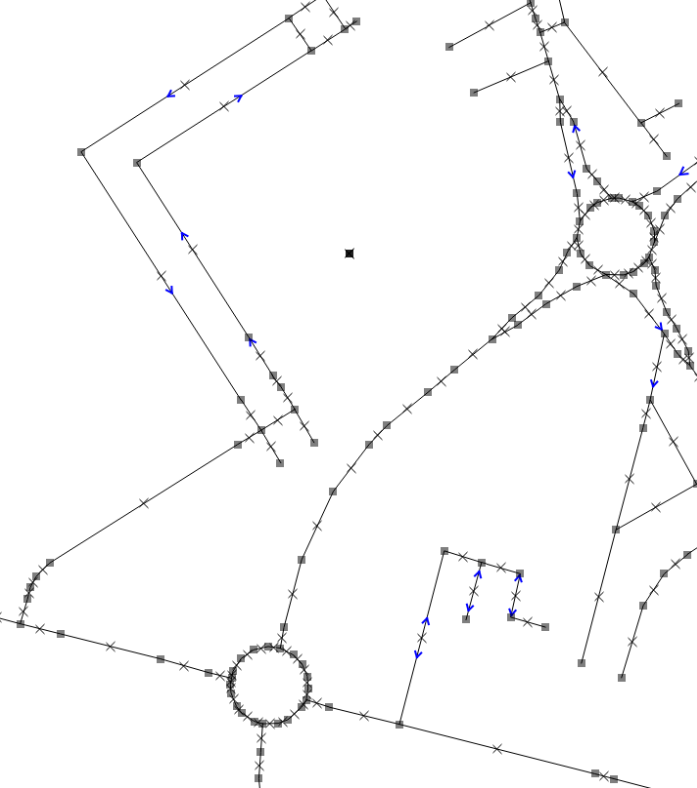
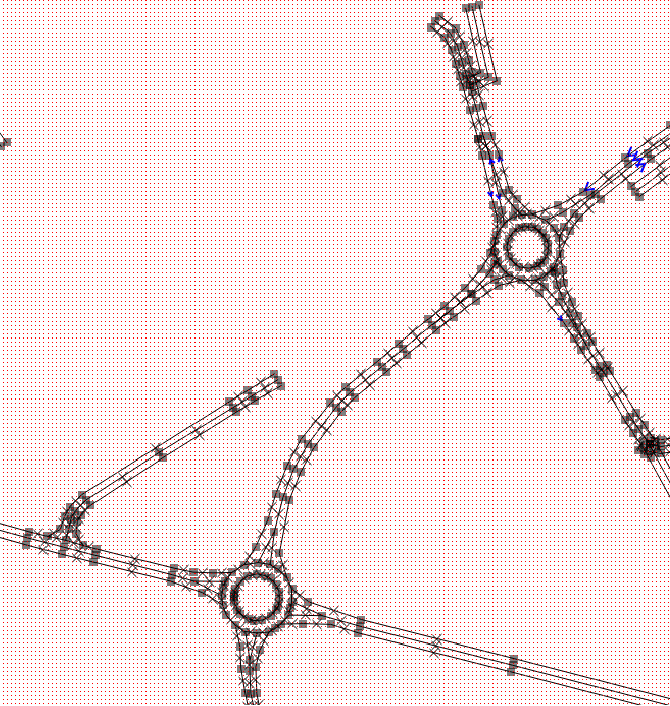
The used map is OpenStreetMap, it allow to have information on the roads and lanes for example, but there is no information about white marking. So we generated semi-autonomously the lines given roads and number of lanes. Moreover we manually corrected the lines for crossroads using satellite image (see Figure 8 ).
|

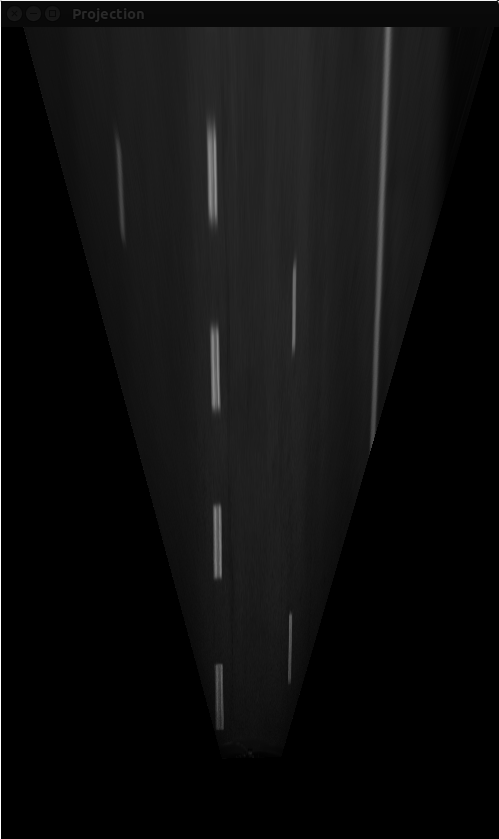
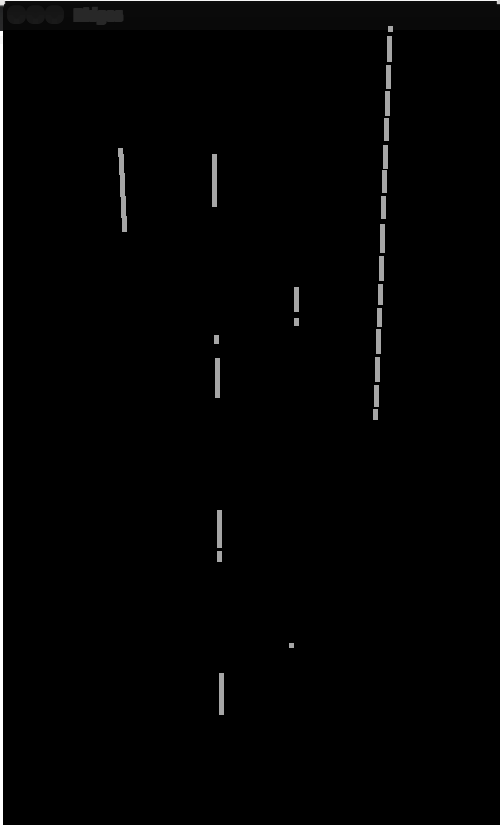
The line extraction is done using ridge detection on a top-down view of the camera image. Moreover we use GPU acceleration to improve performances during image processing (see Figure 9 ).
|

The OSM generated data and the lines extracted from the camera will then be matched and the transformation between the camera and the absolute map will be compute by using an Iterative Closest Point algorithm. In order to improve the precision, a bayesian filtering approach will also be used to merge the previous results with GPS and Inertial Measurement Unit data.